とは
とは
「GEBOTSフレームワーク」は、”省力・省人化”、”無人化”、”IoT化”と”効率的開発支援”を基本コンセプトとして、当社の自動車業界での開発経験で培った技術で農畜産業、船舶業界、鉄道業界などの他業界のお客様の抱える課題を解決する「ソフトウエアフレームワーク」です。
特徴
-
■
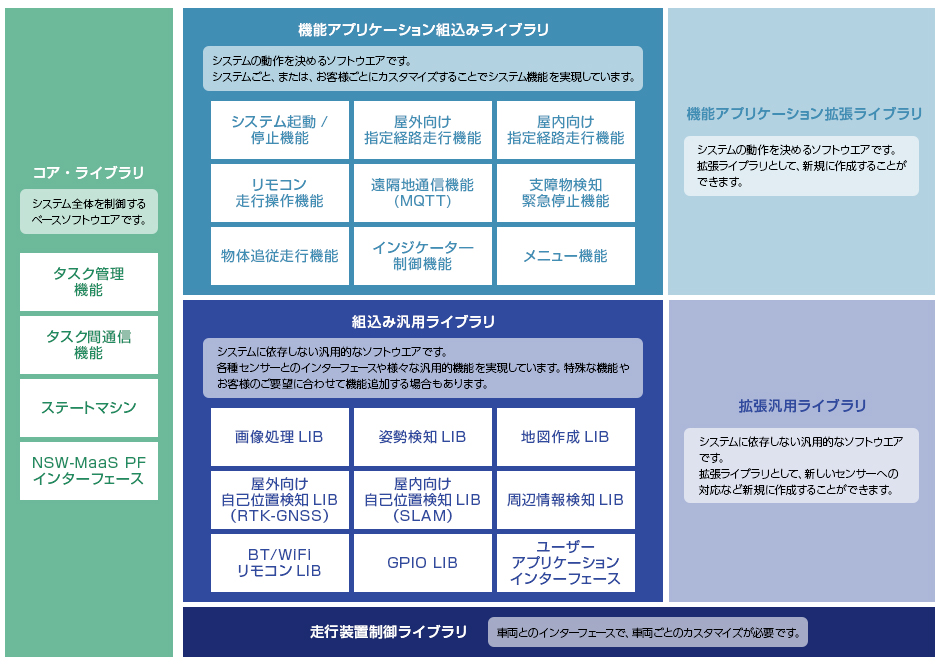
- 既存の走行装置に自動運転やADAS関連の必要な機能を追加する制御ソフトウエアフレームワーク ■
- RTK-GNSS / LiDAR / カメラ / 各種センサーを利用し自己位置推定や周辺情報検知を実現 ■
- 各種センサーおよび走行装置のインターフェースSWモジュールのカスタマイズで様々な機器と接続可能 ■
- 画像認識 / AI / IoTなど独自機能も拡張SWモジュール化することで統合可能 ■
- 動態管理システム
 と連携する動作可能
■
と連携する動作可能
■
- お客様のアプリケーションと連携するための連携APIを提供(2023年リリース予定) ■
実例紹介
自動運搬モビリティロボット(佐渡おけさ柿スマート農業実証プロジェクト)
新潟県佐渡市にて「GEBOTSフレームワーク」(旧称:自動運転・ADAS用外付制御ユニット)を搭載した「クローラー型モビリティロボット」を佐渡島特産「おけさ柿」の栽培における収穫作業とせん定作業の省力化を実現するためのスマート農業実証実験に活用しています。実証実験では「GEBOTSフレームワーク」による認識・制御技術により、ロボットに農作業者を追従走行させて収穫物・せん定枝の積載と運搬支援を行います。また、予め設定された経路に従って自律走行することにより収穫物を無人で運搬します。
「NSW、自動走行運搬ロボットの活用による収穫作業・せん定作業省力化の実証実験を開始」
自律走行型草刈り機
緑地管理に「GEBOTSフレームワーク」を搭載した電動草刈りロボットを導入した事例です。路面走破性の高いクローラー型の草刈りロボットを自律走行させることで、重労働である草刈り作業を省力化しています。草刈りに向いた走行パターンを複数サポートしており、利用者が草地の現況に応じて適切な刈り取り方法を選択できます。路面の凹凸や草の巻き込みによる走行経路のずれを軌道制御により素早く補正し、隙間のない草刈りを実現しています。
新たな自己位置推定技術の取り組み:CLAS
屋外向け自己位置検知LIBで利用しているRTK-GNSS方式は通信回線経由で位置補正情報を入手するため、通信エリアやサービス利用料が課題となります。CLAS方式は、準天頂衛星みちびき(QZSS)から配信される電波から位置補正情報を入手することから通信回線が不要となります。このことからCLASの実用化に向けた取り組みを進めており、すでに従来方式に迫る精度の自律走行を実現しています。
※車体はAgileX Robotics社製のBUNKER mini(国内代理店のデプトシー株式会社様ご提供)