
対応ハードウェア
ハードウェアおよびセンサー
本ユニットは以下のハードウェアおよびセンサーに対応しています。
| 各種入力装置 | ||
| イメージセンサー | 可視画像の検知に利用するセンサーで通常はカメラとなります。 | [標準設定] USB I/F
※他のインターフェースへのカスタマイズも対応可能です。 |
| 距離センサー | 対象との距離を測定するセンサーです。障害物検知やガイド走行(ガイドに倣う自動走行)などで利用します。 | [標準設定] ToFカメラ、超音波センサー
※他センサーへのカスタマイズも対応可能です。 |
| 位置センサー | GNSSを利用した緯度経度を測定するセンサーです。 | [標準設定] GNSS、RTK-GNSS
※RTK-GNSS利用時は別途サービスプロバイダとの契約が必要です。契約不要の準天頂衛星みちびきを利用した新方式(CLAS)も対応予定です。 |
| 姿勢センサー | 走行装置の傾きや方位等を測定するセンサーです。 | [標準設定] IMU(磁気式、加速度センサ式他)
※他のセンサーも対応可能です。 |
| 測域センサー | 走行装置周辺情報の検知に利用するセンサーです。 | [標準設定] 屋内自律走行セットで対応
※他環境での対応は別途ご相談となります。 |
| 接触センサー | 接触することによって障害物を検知するセンサーです。 | 各種走行装置に取り付けられたセンサーを使用します。 |
ソリューション・ラインナップ
名称
概要
ご提供内容
ご提供形式
独自ソリューション
モデル・ソリューション
自律運搬ロボット

RTK-GNSSを利用した自己位置検知機能による屋外向け無人搬送車システム
カスタムソフトウエア+専用車両
注文生産販売
自律走行型草刈り機
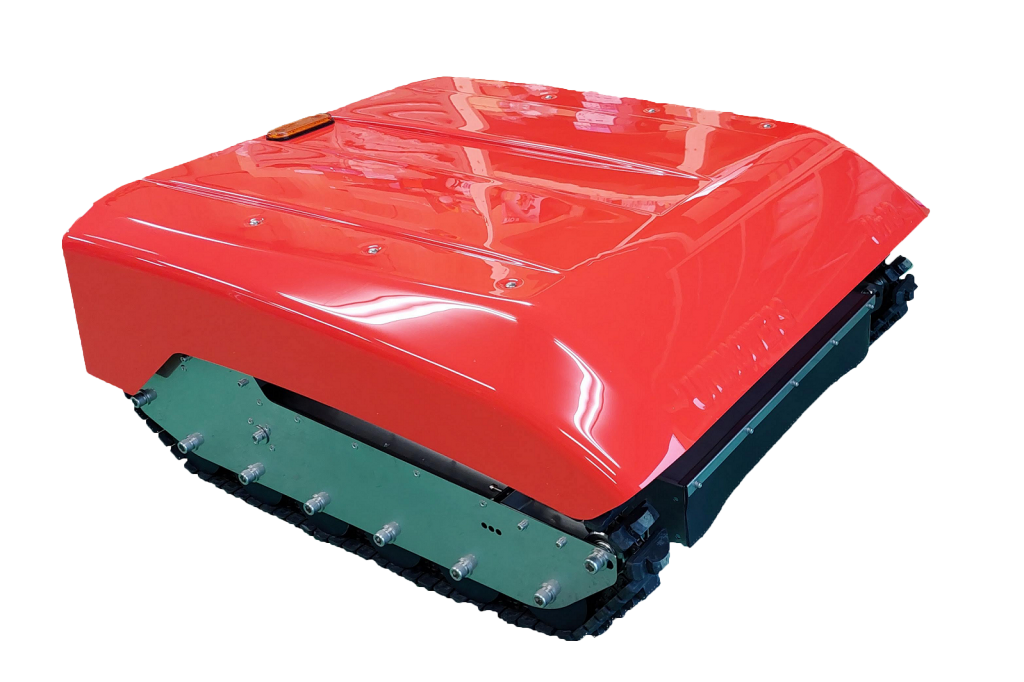
RTK-GNSSを利用した自己位置検知機能による自動草刈りシステム
専用車両(ソフトウエア搭載済)
既製品販売(※1)
後付け障害物検知キット
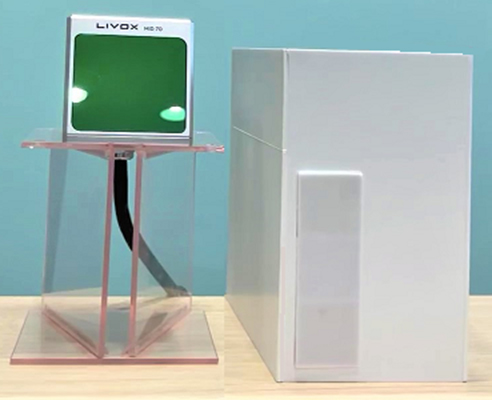
3D-LiDARを利用した後付け支障物検知システム・キット
組込み機器キット(ソフトウエア搭載済)
既製品販売(※1)
屋内自律走行セット

2D-LiDARによるSLAMを利用した屋内自律走行車の研究開発用ベースキット
専用車両(ソフトウエア搭載済)
既製品販売(※1)
GEBOTS

当社が提供するソリューションの基本ソフトウエアライブラリ
ソフトウエア+α
ライセンス販売
※都度、お見積り
※都度、お見積り
※1 ご発注後の生産開始となります。